織機の最も重要と言っても過言ではないセンサーです。
といっても、わりとその挙動まで把握している人は少ないです。
このフィーラーは糸を検知したときにパルスを返しています。
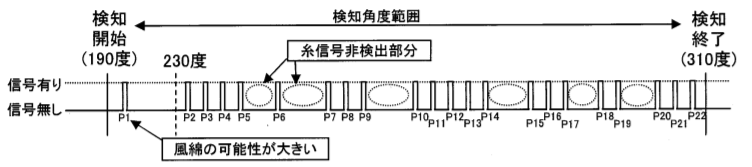 逆に言うとパルスが出ていない部分は検知できていないということになります。
逆に言うとパルスが出ていない部分は検知できていないということになります。
これは糸が到達ショックで戻ってしまったり、糸の末端が振動していてフィーラーの検知範囲内になかったりします。
そのため、到達しているのに緯糸エラーで止まってしまう時は、到達ショックを和らげるように調整したり、
末端に近いサブノズルの角度を調整して、糸がなるべく暴れないようにすることが肝要です。
また、検知開始角度と検知終了角度があるのはゴミなどの要因を排除するためです。
例えば検知開始角度よりも早めに糸が到達したという信号がある場合、糸くずなどのごみの可能性があります。
もちろん、検知開始角度の開始時には糸くずなどのごみの可能性も出てしまうため、いくつかの検知パルスをスキップするように設定できるようになっています。(昔のものはスキップできなかったかもしれません)
検知終了角度が設定されなかったら、前ピックの糸に反応してしまいます。
このセンサーの注意点はセンサー部分にゴミがたまることがあることです。
そうすると、糸がないのにあると判断されてしまい、空織が続いてしまうことがあります。
他にもセンサーの締め付けトルクが甘いと誤検知のもとになりますし、トルクが強すぎるとセンサーが壊れてしまいます。
筬の羽が振動して誤検知することもあるので、振れ止めを付けることもあります。
新しい織機になるほど、このセンサーの値をもとに様々な制御をしているので掃除はしっかりとしましょう。